

Grupo Investigador EGICAD, Departamento de Ingeniería Geográfica y Técnicas de Expresión Gráfica.
Universidad de Cantabria.
Estructuras que aproximan la esfera.
La regularidad a la que desde tiempo inmemorial estamos acostumbrados cuando se trata de subdividir el plano resulta una adquisición reciente cuando se trata de discretizar para su construcción una superficie esférica. Paradigma de este tipo de estructuras, el Domo Geodésico, una malla de barras y nudos dispuestos según las aristas y vértices de un poliedro inscrito en la esfera, es sin duda el tipo constructivo más característico de la segunda mitad del siglo 20.
Mallas Geodésicas: el modelo Fuller.
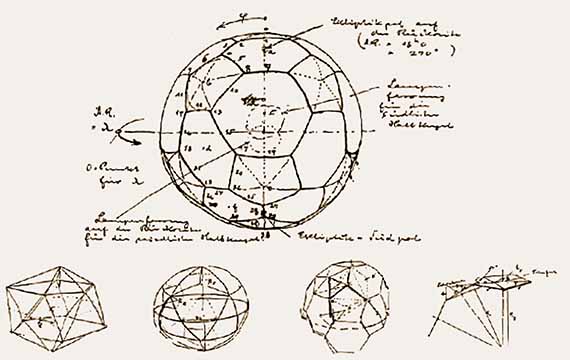
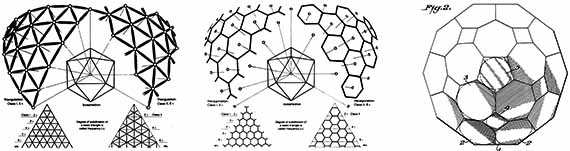
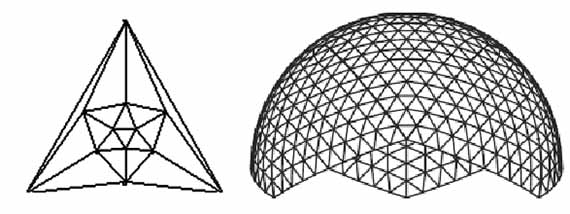
Pocos saben que la primera estructura de este tipo fue concebida en fecha tan lejana como 1922, no por Buckminster Fuller sino por el Dr. Walther Bauersfeld (1879-1959), Ingeniero Jefe de la firma Carl Zeiss en Jena. Su propósito fue alojar un prototipo de planetario. La reproducción de la bóveda celeste en este planetario se lograba gracias al mosaico de imágenes proyectado desde su centro. A cada imagen de este mosaico debía corresponder una superficie aproximadamente igual de la esfera. Para ello la bóveda celeste se traslada a las caras de un poliedro de 12 caras pentagonales y 20 hexagonales (inscritas en círculos de igual radio) obtenido mediante el truncamiento de vértices en un icosaedro (Figura 1b). A partir de esta misma lógica, Bauersfeld ideó una estructura con barras de acero basada en una subdivisión del icosaedro (ver Figura 1a), en que las barras se disponían según arcos de círculos máximos de la esfera. Esta estructura, una vez recubierta de hormigón, pasó a ser también la primera estructura laminar en hormigón armado. De hecho, su carácter de lámina y no la geometría poliédrica de su armadura de refuerzo fue lo que trascendió en ese momento.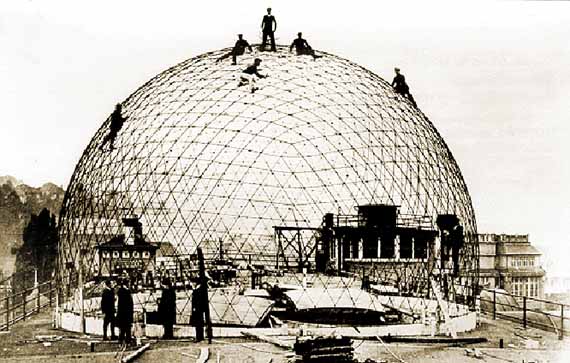
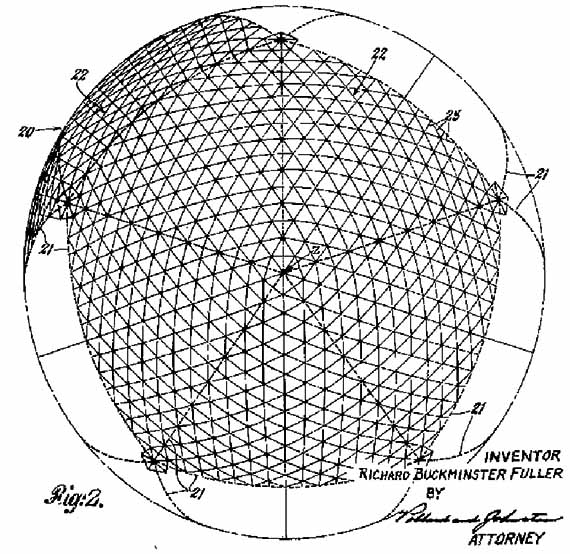
Fuller llega a una solución esencialmente igual treinta años después transitando por una vía análoga a la de Bauersfeld. Desde fines de la década de 1930 se interesa por representaciones alternativas del globo terráqueo. La proyección del globo terráqueo sobre el plano supone un problema similar al que debió resolver Bauersfeld: trasladar una superficie esférica (al menos en apariencia) sobre un mosaico de superficies planas, en este caso las caras de un cuboctaedro (Figura 2a). En el mapa que Fuller llamó “Dymaxion” se establece una correspondencia entre la ubicación de un determinado punto de la esfera y la situación que le corresponde sobre el plano a partir de ubicar dicho punto en una retícula de arcos de círculo máximo cuya proyección gnomónica sobre la correspondiente cara plana del poliedro es una línea recta.
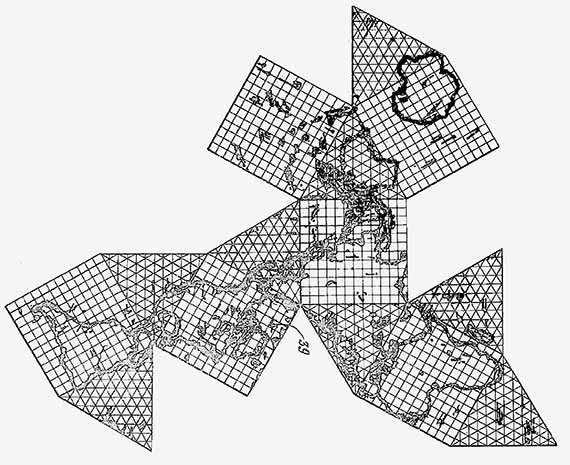
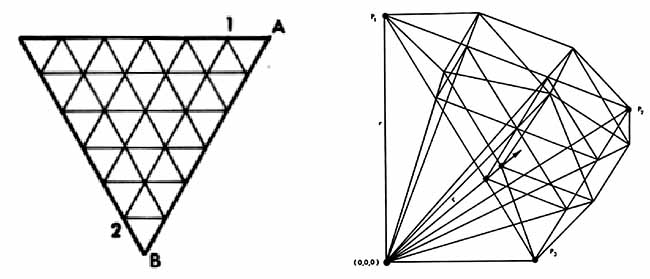
Si examinamos el detalle de la retícula en la cara triangular que se incluye en la patente 6 del mapa Dymaxion (Figura 2b), encontraremos un parecido sorprendente con la estructura de Bauersfeld (Figura 1a).
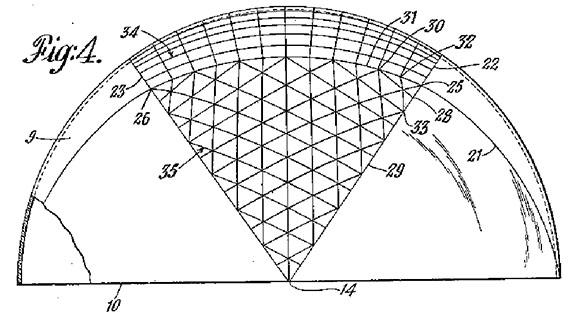
El domo de Bauersfeld había sido objeto de patente, pero sólo como estructura laminar de hormigón armado pasando por alto la geometría del refuerzo. Esto permitió a Fuller atribuirse treinta años más tarde, a fines de 1951 (Figura 3a), la paternidad de “una armazón de forma generalmente esférica” cuyos elementos estructurales principales se interconectan en “un diseño geodésico de arcos de círculos máximos formando una retícula tridireccional”. Ya para esta fecha Fuller abandona el cuboctaedro como poliedro base, tomando así como lo hizo Bauersfeld, el icosaedro como punto de partida para su estructura.
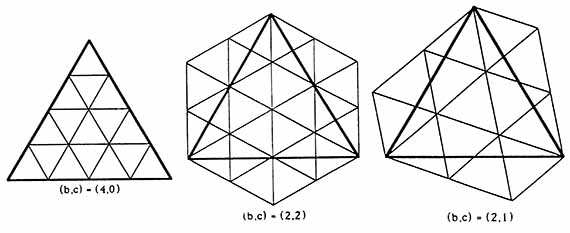
El primer intento de sistematizar los procedimientos para la obtención de las particiones geodésicas de la esfera se realizó en la Southern IllinoisUniversity (Campus de Carbondale) bajo la dirección de Joseph D. Clinton. El estudio, que se desarrolló entre 1964 y 1971 fue patrocinado por la NASA que veía en ese tipo de estructuras posibles aplicaciones para futuras misiones espaciales. Como resultado Clinton publica 2 ocho métodos aplicables a dos topologías diferentes para las que propone los nombres de Clase I y Clase II. Estos “métodos” se proponen como aplicables a cualquier poliedro de caras triangulares, con lo que se generaliza el procedimiento para incluir otros distintos del icosaedro.
Todos estos métodos parten de subdividir, según el orden de frecuencia deseado, las aristas de una cara del poliedro base o de parte de ella para obtener una trama tridireccional cuyos vértices se trasladan en una proyección Gnomónica a la esfera circunscrita. Las diferencias entre ellos radican en:
- La topología, que puede ser Clase I (direcciones paralelas a los lados) o Clase II (direcciones perpendiculares a los lados).
- Si se hace esta subdivisión sobre la cara completa o sobre su triángulo de Schwarz (una sexta parte de la misma, 1/120 de la esfera en el caso del icosaedro).
- Si se subdivide la arista en longitudes iguales o en longitudes desiguales a partir de ángulos centrales iguales del poliedro (logrando en este segundo caso arcos de círculo máximo de igual longitud).
Gracias a las condiciones de simetría de los poliedros, basta una cara para la definición de las propiedades geométricas de la estructura.
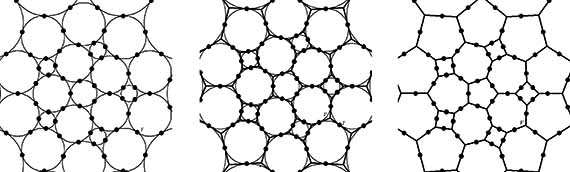
Estas categorías fueron redefinidas por H. M. Wenninger 11 quien incorporó una Clase III para las topologías sesgadas puestas de manifiesto por las investigaciones de Caspar y Klug 8 en torno a la estructura de las cápsulas de los virus (Figura 5).
Otras Estructuras: los modelos Wester y Yacoe.
El profesor Ture Wester 13 llega a la estructura que define como de Panel (Plate) a partir de la transformación descrita bajo el término de reciprocación polar por Wenninger en su obra Dual Models 12. El modelo Wester se obtiene a partir del modelo Geodésico de barras y nodos aplicando el principio de la dualidad (Figura 6, izquierda y centro). Los poliedros duales poseen el mismo número de aristas pero las cantidades de vértices y caras se intercambian. Estas caras y estos vértices cumplen el requisito de que a una cara de n lados en uno de ellos corresponde, en su poliedro dual, un vértice donde concurren n aristas.
Las estructuras Geotangentes propuestas por Yacoe y Davies en 1986 14 pueden tener dos tipos de caras que son polígonos regulares (en el ecuador y en el polo norte de la esfera), y al menos la mitad de las otras caras son pentágonos o hexágonos no equiláteros (Figura 6, derecha). Poseerán al menos 14 caras, y cada vértice es la unión de tres o cuatro aristas de polígono. La esfera que es aproximada por este tipo de poliedro es tangente a cada arista en sólo un punto y corta cada cara del poliedro según un círculo inscrito dentro de dicha cara (Figura 6, derecha). Cada uno de estos círculos es tangente al círculo inscrito en cada polígono adyacente. El procedimiento para el cálculo de las formas y dimensiones de las caras tal como aparece descrito en el documento de la patente es complejo, debiendo resolverse mediante un proceso iterativo a partir de aproximaciones sucesivas.
Inversión del Plano sobre una Esfera.
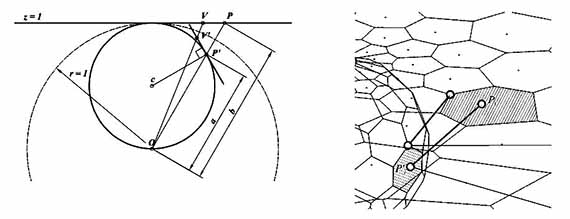
Repasando los "Fundamentos de Geometría" de Coxeter, encontramos una figura (Figura 7) que nos parece muy ilustrativa de las diferencias entre el enfoque que proponemos en esta investigación y los métodos clásicos para el diseño de mallas espaciales esféricas. Aquí se comparan dos paradigmas, la proyección Estereográfica y la proyección Gnomónica o central. La figura izquierda representa el plano y la esfera que es producto de la inversión del plano respecto a una esfera de radio NS con centro en N (que no se muestra en el dibujo). A cada punto del plano corresponde un punto sobre la esfera que es su inverso respecto a la esfera de radio NS. El inverso del punto N es el punto en el infinito.
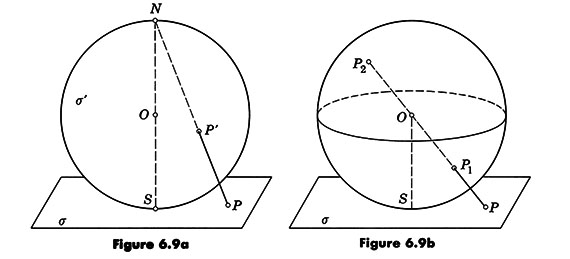
En la proyección Gnomónica representada a la derecha, en lugar de proyectar desde N se proyecta desde el centro O de la esfera. En este caso, cada punto del plano representa a la vez dos puntos de la esfera P1 y su antípoda P2. Los círculos sobre la esfera se invierten en la proyección Estereográfica como círculos en el plano y viceversa. En la Gnomónica, los círculos máximos se proyectan como rectas.
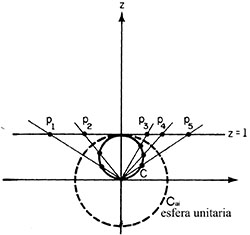
La Figura 8 representa la misma proyección Estereográfica de la ilustración de Coxeter, sólo que ahora vuelta al revés. La esfera Cai respecto a la que se hace la inversión, omitida en dicho dibujo es ahora una esfera de centro en el origen del sistema de coordenadas y radio 1. El plano z=1 (y en consecuencia los puntos P1,P2, P3, … Pn) se invierte en la esfera C de radio ½, tangente al plano z=1 en su polo norte y cuyo polo sur se encuentra en el origen del sistema de coordenadas.
Podemos expresar C por su ecuación: 
.jpg) (1)
(1)La expresión matricial de esta inversión de centro en el origen de coordenadas y de potencia 1 viene expresada en coordenadas homogéneas en R3 por la expresión:
.jpg) | (2) |
donde: D2 = X2 + Y2 + Z2.
Denominamos MINV a esta matriz operadora. El procedimiento alternativo que aquí presentamos supone establecer una nube de puntos sobre el plano z=1 que se traslada a la esfera de radio = ½ mediante una proyección estereográfica. En este caso, el plano es capaz de representar a la esfera en su totalidad con su polo sur en el punto del infinito.
Aproximación a los tres Modelos de Mallas Espaciales.
El estudio clásico de los Poliedros recurre a la asociación de este sólido con la esfera. Así, podemos hablar de tres esferas relacionadas con un poliedro:
- La esfera circunscrita, que pasa por todos sus vértices.
- La esfera inscrita, a la cual son tangentes todas sus caras.
- La esfera media, a la cual son tangentes todas sus aristas.
En un poliedro regular podemos identificar las tres. Pero las mallas espaciales sobre las que trabajamos no son poliedros regulares. Cada uno de los modelos que hemos estudiado se relaciona con la esfera que aproxima de una de estas tres maneras:
- El modelo Fuller (Geodésico o de Entramado) con la esfera circunscrita.
- El modelo Wester (de Panel) con la esfera inscrita.
- El modelo Yacoe (Geotangente) con la esfera media.
Hasta ahora nos hemos referido a la obtención de las mallas espaciales como si se tratara simplemente de invertir los puntos del plano Z=1 sobre la esfera de radio ½ y aplicar la transformación MINV. Pero para cada tipología estos puntos representan algo distinto. Resulta evidente que su interpretación geométrica dependerá en cada caso del modelo de malla espacial que pretendemos plasmar:
- En una malla Geodésica o de Entramado (modelo Fuller), los puntos serán interpretados como los vértices de las caras triangulares del poliedro aproximante (nodos de una estructura de entramado).
- Para las mallas de Panel (modelo Wester) 9, serán los puntos donde las caras son tangentes a la esfera inscrita.
- En el modelo Yacoe, estos puntos corresponden a los puntos de tangencia de las aristas del poliedro con la esfera.
Modelo Fuller.
En el caso del modelo Fuller, sólo faltaría plasmar el modelo de interconexión a partir del conjunto S de puntos en z=1. Para un poliedro de caras trianguladas, el esquema de conectividad para el conjunto de puntos estaría dado por la triangulación de Delaunay. Las caras del poliedro aproximante a la esfera circunscrita resultan de unir los puntos sometidos a la transformación MINV según el esquema de conectividad así obtenido (Figura 9, derecha). Esta correspondencia se hace especialmente evidente en la Figura 9 (izquierda), donde la Triangulación de Delaunay a partir de la proyección estereográfica de los vértices de un icosaedro reproduce el Diagrama de Schlegel de ese sólido.
Modelo Wester.
Para el modelo Wester debemos resaltar dos diferencias: la representación de las aristas y vértices resulta de construir el Diagrama de Voronoi a partir del conjunto de puntos S en z=1. Ahora el vértice no se encuentra sobre la superficie esférica. El punto invertido desde z=1 no corresponde al vértice, sino al punto de tangencia de la cara con la esfera inscrita y corresponde a un generador P del Diagrama de Voronoi. El vértice V’ será el punto donde la línea que va del centro de inversión O al vértice V del Diagrama de Voronoi intercepta el plano tangente (Figura 10).
Modelo Yacoe.
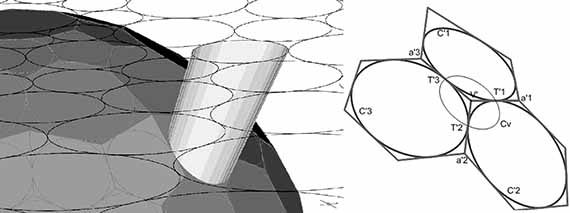
La trama estructural para el modelo Yacoe se obtendrá a partir de un empaquetamiento radial de círculos en el plano z=1. La Figura 11, izquierda, muestra el empaquetamiento a partir del cual se obtendrá el poliedro que muestra la Figura 6, derecha. Si consideramos que el eje radical de dos circunferencias tangentes es su tangente común 10, podemos obtener una subdivisión plana SD (Diagrama de Potencia) a partir de cualquier empaquetamiento de circunferencias tangentes (Figura 11, centro y derecha).
Suponiendo SD en el plano z = 1 y aplicando una inversión con centro en el origen de coordenadas (0, 0, 0) y potencia 1:
- Los puntos de tangencia T entre los ejes radicales y las circunferencias queden transformados en puntos T’ de la esfera E de centro en (0, 0, ½) y radio ½.
- Las aristas a’1, a’2 y a’3 tangentes a la esfera E en los puntos T’1, T’2 y T’3 (que determinan en la esfera un plano α) concurren en un punto V’ (ver Figura 12). Esas aristas son generatrices de un cono circunscrito, tangente a la esfera y el vértice de ese cono (a su vez vértice del poliedro aproximante) es el polo del plano α respecto a la esfera E.
Aproximación a otras cuádricas: el Paraboloide Ω.
Abordaremos ahora la problemática del diseño de mallas estructurales que aproximen a otras superficies cuádricas. Para ello proponemos ahora la transformación proyectiva MHOM, expresada en coordenadas homogéneas como:
.jpg) | (4) |
donde referimos como (X Y Z T) el punto transformado del (x y z t). Dado un conjunto de puntos S={P1, P2, ... Pn} sobre el plano z = 1, la superficie de tipo paraboloide de revolución surge de aplicar a S la siguiente secuencia de transformaciones:
P" = MHOM * MINV * P (5)
En resumen, esta transformación proyectiva MHOM tiene las siguientes características:
- Transforma el plano z=1 en el plano Z=1.
- Transforma la esfera C (ver Figura 8) en el paraboloide Ω (Figura 13, izquierda).
- Transforma el origen del sistema {O;x,y,z} en el punto del infinito del eje OZ en el sistema {O;X,Y,Z}.
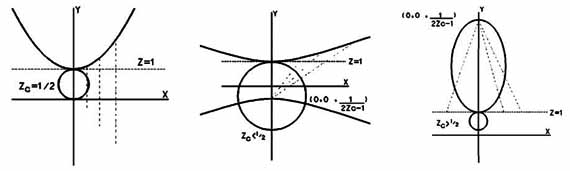
Figura 13. Paraboloide, Hiperboloide y Elipsoide de revolución generados a partir de este procedimiento.
Generación del Hiperboloide y el Elipsoide de Revolución.
Un procedimiento como el descrito que incluye la inversión de un conjunto de puntos en el plano z=1 y la transformación proyectiva MHOM es también aplicable13 a cualquier esfera de radio distinto de ½. Una esfera genérica de este tipo tiene el centro expresado como (0, 0, Zc) y por la expresión:
CG : x2 + y2 + ( z - zc )2 = ( 1 - zc )2 (6)
El polo sur de esta esfera es el (0, 0, 2zc - 1). Si desde aquí se aplica la inversión, los inversos de los puntos del plano z=1 se sitúan sobre la esfera CG. Si se aplica entonces la transformación proyectiva MHOM la esfera se transforma en la cuádrica de revolución
CR : x2 y2 + ( 1 - 2zc ) z2 - 2zc z + 1 = 0 (7)
La transformación proyectiva MHOM del conjunto de puntos S’ desde el punto ( 0, 0, ½ zc - 1 ) genera la cuádrica de revolución CG. La naturaleza de la superficie surge de la siguiente casuística:
- Cuando zc = ½, CG es un paraboloide de revolución.
- Cuando zc < ½, CG es un hiperboloide de revolución de 2 hojas.
- Cuando zc > ½, CG es un elipsoide de revolución.
Superficies Cuádricas de formas sesgadas.
Resulta natural preguntarse cuál sería el resultado de aplicar la transformación antes descrita a una esfera tangente al plano z = 1 pero cuyo centro ocupe una posición cualquiera en el espacio 10. Esto añade dos grados de libertad más respecto al procedimiento básico para la obtención del paraboloide:
- Se liberaliza la condición de radio igual a ½.
- Se liberaliza la condición de centro sobre OZ.
Esta nueva situación puede reducirse a la primera de las estudiadas aplicando una traslación y un escalado.
- MESC : Una traslación del polo sur de la esfera de valor (0, 0, 2Zc -1) que lo lleva al origen de coordenadas (la esfera deja de ser tangente al plano z = 1).
- MTRA : Una homotecia con centro en el origen de coordenadas (donde ahora se encuentra el polo sur de la esfera) y de potencia ½ r, que transformará la esfera de radio r = 1 - Zc en una de radio ½.
Bastará con deshacer posteriormente las operaciones de transformación. El resultado es una transformación compuesta de cinco matrices operadoras que se expresa como sigue:
| | (8) |
Los puntos P'' que surgen de los P (puntos en el plano z = 1) corresponden a una cuádrica genérica que presenta un aspecto sesgado.
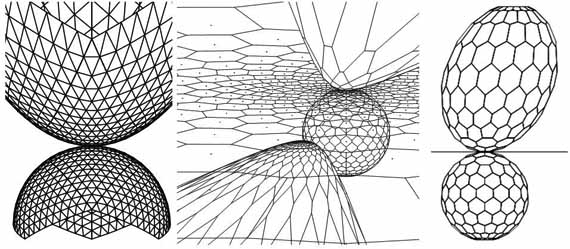
En resumen, el procedimiento descrito permite generar formas cuádricas variadas (ver Figura 14) a partir de la inversión y transformación proyectiva de nubes de puntos contenidas en el plano z=1. La investigación en torno a este tema continúa actualmente abordando temas tales como las estrategias para la optimización de las mallas generadas.
Referencias.
- Bauersfeld, W. (1957) Projection Planetarium and Shell Construction. Conferencia en la Institution of Mechanical Engineering, Londres, mayo 10, 1957. Esta referencia y otros datos has sido tomados del documento Geodesic Domes and Charts of the Heavens
- Clinton, Joseph D. (1971) Advanced Structural Geometry Studies: Part I - Polyhedral Subdivision Concepts for Structural Applications, NASA Contractor Report, NASA CR-1734, National Aeronautics and Space Adminstration, Washington, DC, September 1971.
- Coxeter, H. S. M., (19.. ) Fundamentos de Geometría.
- Coxeter, H. S. M. (1972) Virus Macromolecules and Geodesic Domes. A Spectrum of Mathematics, Auckland University Press and Oxford University Press, pp. 98-107.
- Coxeter, H. S. M. (1974) Regular Complex Polytopes. Cambridge University Press.
- Fuller, R. B. (1946) Cartography. U.S. Patent 2,393,676.
- Fuller, R. B. (1954) Building Construction. U.S. Patent 2,682,235.
- Morgan, G. J. (2003) Historical review: Viruses, crystals and geodesic domes. En TRENDS in Biochemical Sciences Vol.28 No.2, pp. 86-90.
- Otero C., Gil V., Álvaro J. I. (2000) CR-Tangent Meshes. IASS Journal Vol. 41 Nº. 132, pp. 41-48.
- Otero C., Togores R. (2002) Computational Geometry and Spatial Meshes. En Lecture Notes On Computer Science 2002 . Vol. 2. pp. 315-324. Springer. 2002.
- Rothman, T. . Las fotos de la estructura y de los esquemas originales son propiedad de la firma de ingeniería Dyckerhoff and Widmann.
- Togores, R., y Otero, C. (2003) Planar Subdivisions by Radical Axes applied to Structural Morphology. Ponencia presentada a la International Conference on Computer Science and its Applications (ICCSA2003), Montreal.
- Togores, R.(2003) Métodos de Geometría Computacional Aplicados al Diseño de Estructuras Espaciales. Tesis Doctoral. Universidad de Cantabria.
- Wenninger, M. J. (1979) Spherical Models, Cambridge University Press, Londres.
- Wenninger, H. M. (1983) Dual Models. Cambridge University Press.
- Wester, T. (1990) A Geodesic Dome-Type Based on Pure Plate Action. Special Issue on Geodesic Forms, International Journal of Space Structures. Vol. 5, Nº. 3 y 4.
- Yacoe, J. C. (1987) Polyhedral Structures That Approximate a Sphere. U. S. Patent 4,679,361.